Fearless Concurrency
The title of this post is shamelessly borrowed from the Rust book: “Fearless Concurrency”. As that suggests, today’s topic is concurrency in Rust.
Fork-Join Parallelism
Suppose we have a function that processes multiple files:
fn process_files(filenames: Vec<String>) -> io::Result<()> {
for document in filenames {
let text = load(&document)?;
let results = process(text);
save(&document, results)?;
}
Ok(())
}
It loops over files and, for each one, runs load → process → save.
Visually, the sequential execution looks like this:

Since each file is independent, it’s natural to think about processing them in parallel, one file per thread:
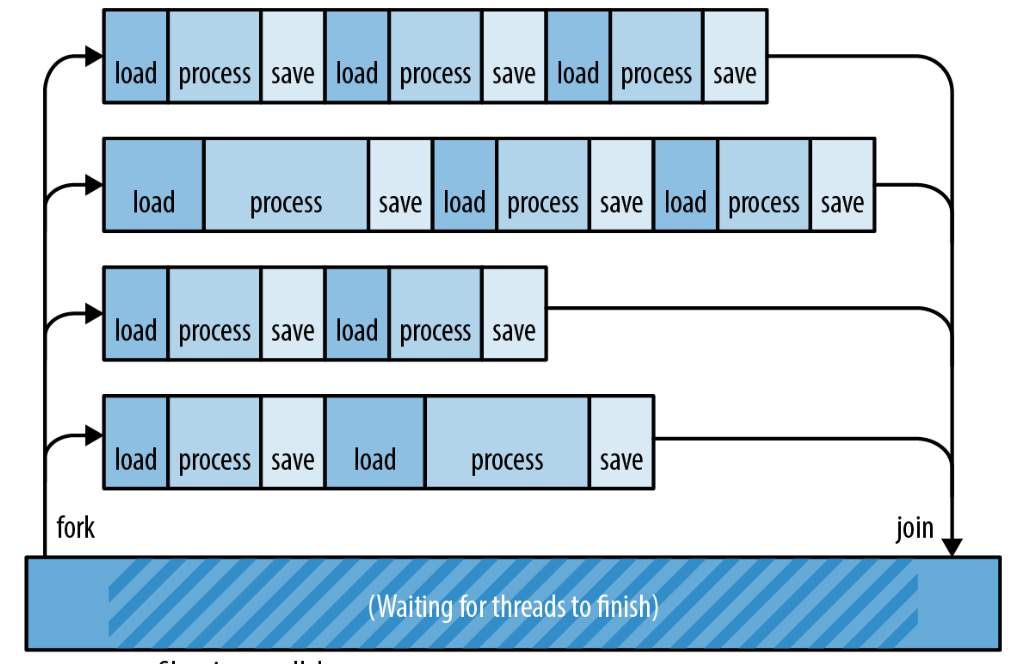
This pattern is called fork-join parallelism:
- fork: start new threads.
- join: wait for them all to finish.
It has some nice properties:
- Simple to implement.
- No shared state; no locks or other synchronization primitives needed.
- Easy to debug; if each thread is self‑contained, behavior is deterministic.
Of course, this assumes that the overall task can be broken into mostly independent pieces, as with our file example.
spawn and join
Here’s how we might rewrite the example using fork‑join parallelism:
use std::{thread, io};
fn process_files_in_parallel(filenames: Vec<String>) -> io::Result<()> {
let worklists = split_vec_into_chunks(filenames, 8);
let mut thread_handles = vec![];
for worklist in worklists {
thread_handles.push(
thread::spawn(move || process_files(worklist))
);
}
for handle in thread_handles {
handle.join().unwrap()?;
}
Ok(())
}
Compared to the original, we now use spawn and join.
First, spawn. Its full signature is:
pub fn spawn<F, T>(f: F) -> JoinHandle<T>
where
F: FnOnce() -> T,
F: Send + 'static,
T: Send + 'static,
spawn takes a closure or function and starts a new OS thread to run it. The closure must be FnOnce, Send, and 'static. The return value is a JoinHandle<T>, and calling join waits for the thread to finish and returns the closure’s result.
Example:
use std::thread;
thread::spawn(|| {
println!("hello from a child thread");
});
Next, join:
impl<T> JoinHandle<T> {
pub fn join(self) -> Result<T>
}
join returns a Result<T>; if the thread panicked, you get Err. In our example we use unwrap()? to both surface panics and propagate io::Result errors. One key point: in Rust, a panic in one thread does not bring down the entire process. Panics are isolated to their threads, making threaded code more robust.
Sharing Immutable Data
Now suppose we also want to pass in a large glossary for processing:
fn process_files_in_parallel(
filenames: Vec<String>,
glossary: &GigabyteMap,
) -> io::Result<()> {
// ...
for worklist in worklists {
thread_handles.push(
thread::spawn(move || process_files(worklist, glossary))
);
}
// ...
}
Since the glossary is large, we’d like to pass it by reference. But this won’t compile:
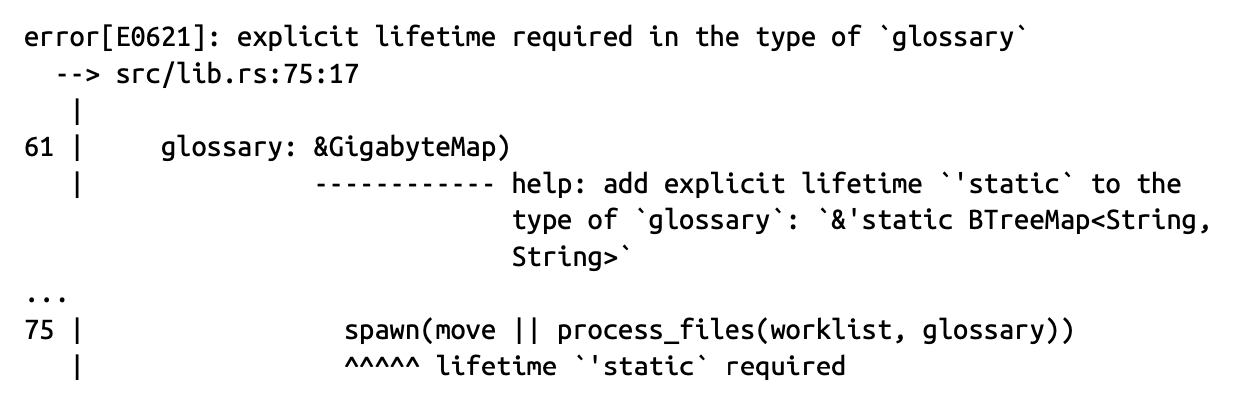
Rust doesn’t know how long the spawned threads will live. It must assume the worst: that a thread could outlive the spawning function. If glossary was a local reference, the thread might try to use it after it’s freed.
We could make glossary 'static, but that’s rarely what you want for large data.
The idiomatic solution in Rust is to use Arc (Atomic Reference Counting). If you know Swift, this is similar in spirit to ARC there, but here the “A” stands for Atomic (thread‑safe), not Automatic. (Rust also has Rc, which is faster but not thread‑safe.)
Arc<T> keeps a reference count of shared ownership. When the count hits zero, it drops the value. Since it’s thread‑safe, multiple threads can share immutable access.
Rewriting with Arc:
use std::sync::Arc;
fn process_files_in_parallel(
filenames: Vec<String>,
glossary: Arc<GigabyteMap>,
) -> io::Result<()> {
// ...
for worklist in worklists {
let glossary_for_child = glossary.clone();
thread_handles.push(
thread::spawn(move || process_files(worklist, &glossary_for_child))
);
}
// ...
}
Here clone only clones the Arc pointer (incrementing the ref count), not the underlying GigabyteMap. As long as the count is > 0, the map stays alive. Because we only read from it, and Arc is immutable by default, we avoid data races.
Rayon
The standard spawn API is a low‑level primitive; it’s not specifically tailored to fork‑join patterns. If you’re doing a lot of fork‑join parallelism, consider the rayon crate. It wraps spawn with a nicer API and manages a thread pool for you. See the Rayon docs for details.
Channels
A channel is a one‑way communication pipe used to send data from one thread to another. Think of it as a thread‑safe queue:
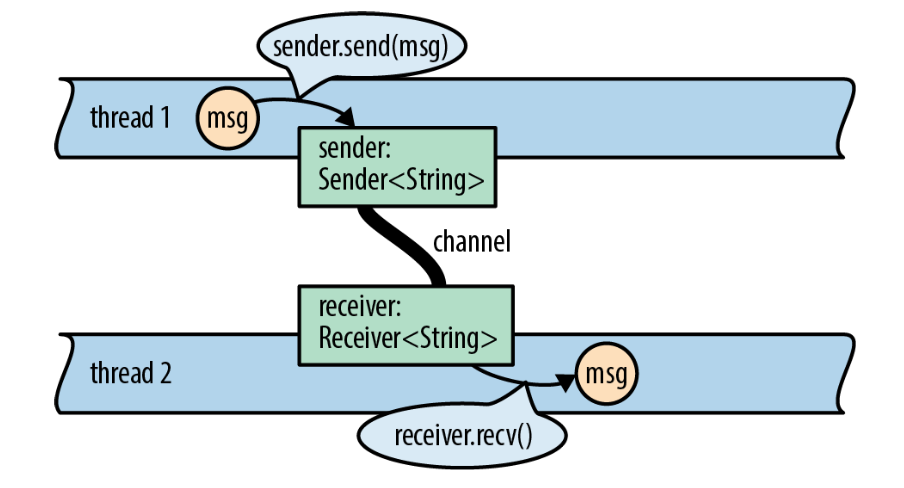
In the diagram, sender.send(msg) pushes a value into the channel, and receiver.recv() removes one. If the channel is empty, recv() blocks until a value arrives. Sending a value moves ownership from the sending thread to the receiving thread, keeping it efficient.
Compared to locks, channels offer a higher‑level abstraction for communication and can help you avoid shared mutable state.
Rust isn’t inventing anything new here; Erlang and Go have very similar concepts. The classic Go mantra applies:
Do not communicate by sharing memory; instead, share memory by communicating.
An Example
Let’s build a simple multi‑threaded pipeline using channels.
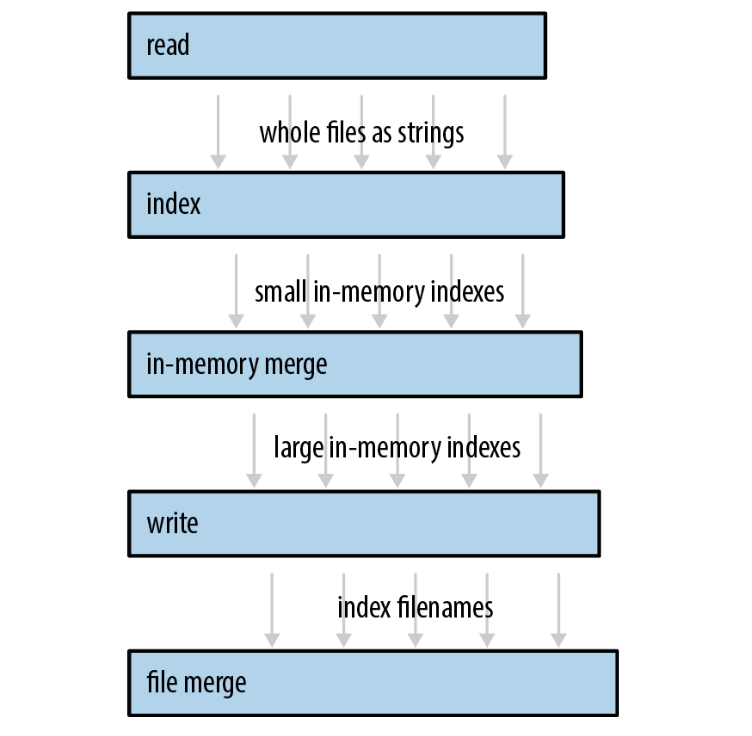
The task: build an inverted index from a set of documents. Given a term, we want to know which documents contain it. We’ll handwave over the exact indexing details and use a fake InMemoryIndex type.
We’ll use five threads, each doing one stage:
Sending Values
We start by reading files on one thread:
use std::{fs, thread};
use std::sync::mpsc;
fn start_file_reader_thread(
documents: Vec<PathBuf>,
) -> (mpsc::Receiver<String>, thread::JoinHandle<io::Result<()>>) {
let (sender, receiver) = mpsc::channel();
let handle = thread::spawn(move || {
for filename in documents {
let text = fs::read_to_string(filename)?;
if sender.send(text).is_err() {
break;
}
}
Ok(())
});
(receiver, handle)
}
mpsc::channel creates the channel. The function returns the Receiver<String> and the JoinHandle for the reader thread.
The channel is typed; here it carries Strings. The fully explicit type would be mpsc::channel::<String>(), but type inference usually saves you from writing it.
We move sender into the thread and call sender.send(text) for each file. Both send and recv return Results, but they only fail when the other end of the channel is dropped. If the receiver is gone, send fails; if all senders are gone and the channel is empty, recv fails.
In our case, send will fail when the receiver thread shuts down, so we just break and return Ok(()) (or propagate any I/O errors).
Receiving Values
Next, create another thread that consumes those strings and builds InMemoryIndexes:
fn start_file_indexing_thread(
texts: mpsc::Receiver<String>,
) -> (mpsc::Receiver<InMemoryIndex>, thread::JoinHandle<()>) {
let (sender, receiver) = mpsc::channel();
let handle = thread::spawn(move || {
for (doc_id, text) in texts.into_iter().enumerate() {
let index = InMemoryIndex::from_single_document(doc_id, text);
if sender.send(index).is_err() {
break;
}
}
});
(receiver, handle)
}
The Receiver is iterable, so we can just use for to get incoming values.
Subsequent stages (merging, writing index files, merging files) are similar; I’ll just show their signatures:
// Stage 3
fn start_in_memory_merge_thread(
file_indexes: mpsc::Receiver<InMemoryIndex>,
) -> (mpsc::Receiver<InMemoryIndex>, thread::JoinHandle<()>)
// Stage 4
fn start_index_writer_thread(
big_indexes: mpsc::Receiver<InMemoryIndex>,
output_dir: &Path,
) -> (mpsc::Receiver<PathBuf>, thread::JoinHandle<io::Result<()>>)
// Stage 5 (no receiver; runs on caller's thread)
fn merge_index_files(
files: mpsc::Receiver<PathBuf>,
output_dir: &Path,
) -> io::Result<()>
Finally, we tie the stages together:
fn run_pipeline(
documents: Vec<PathBuf>,
output_dir: PathBuf,
) -> io::Result<()> {
let (texts, h1) = start_file_reader_thread(documents);
let (pints, h2) = start_file_indexing_thread(texts);
let (gallons, h3) = start_in_memory_merge_thread(pints);
let (files, h4) = start_index_writer_thread(gallons, &output_dir);
let result = merge_index_files(files, &output_dir);
let r1 = h1.join().unwrap();
h2.join().unwrap();
h3.join().unwrap();
let r4 = h4.join().unwrap();
r1?;
r4?;
result
}
We use join().unwrap() to surface panics in the worker threads, but we delay propagating I/O errors until after all threads have joined. That way, even if one stage fails, we still shut down the pipeline cleanly.
mpsc
We’ve been using std::sync::mpsc, so what does mpsc stand for? multi‑producer, single‑consumer.
Rust’s standard channels support multiple senders and a single receiver.
To add more senders, clone the original sender and move each clone into its own thread. The receiver side cannot be cloned; if you need multiple threads consuming from the same queue, you’ll need a Mutex or similar.
Performance
Rust’s standard channel is highly optimized:
- Initially it uses a “one‑shot” queue implementation; if you only send one value, overhead is tiny.
- When you send a second value, it transparently switches to a different queue type that supports unbounded sends with minimal allocations.
- When you clone the sender, it switches again to a slightly slower queue that supports multiple producers. Even that implementation is lock‑free.
- Only when the channel is empty and a receiver calls
recvdoes it park the thread with a system call.
One common performance pitfall is mismatched producer/consumer speeds. If senders outpace receivers, the channel backs up with unprocessed data, and senders may monopolize CPU time.
To avoid this, Rust offers synchronous channels with backpressure. Use sync_channel instead of channel:
use std::sync::mpsc;
let (sender, receiver) = mpsc::sync_channel(100);
This creates a channel with capacity 100. Once the channel holds 100 items, send blocks until a receiver takes something.
If you pass capacity 0, every send blocks until a receiver is ready.
Send and Sync
By now we’ve brushed up against “thread safety” several times. In Rust, two marker traits encode this: Send and Sync from std::marker.
Send: a type that is safe to move to another thread.Sync: a type that is safe to share references to between threads.
Most standard library types are both Send and Sync:
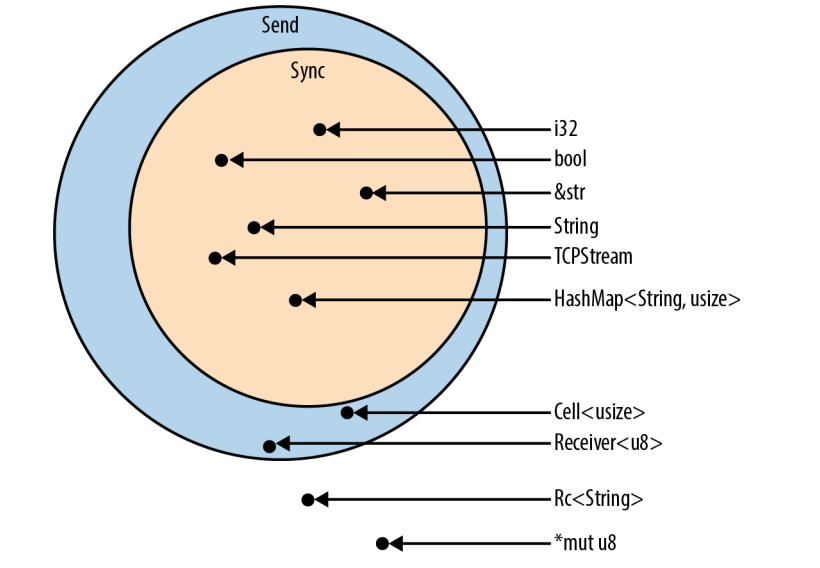
If all of a struct’s fields are Send/Sync, the struct itself is automatically Send/Sync. You don’t need derive.
You might think that Send implies Sync, but that’s not always the case. Our earlier Receiver type for channels is Send but not Sync, ensuring it’s only used by one thread at a time.
Many non‑Send/Sync types are those that use non‑atomic interior mutability, such as Rc.
Shared Mutable State
We’ve seen two concurrency models so far:
- Fork‑join parallelism for highly parallel computations.
- Channels for decoupled component communication.
But sometimes you really do need shared, mutable state accessed from multiple threads.
One approach is to spawn a dedicated state manager thread and have other threads interact with it solely via channels. That works, but threads are not free.
Rust also offers lower‑level primitives for shared mutable state.
Mutex
A mutex (lock) enforces mutual exclusion: only one thread can access the protected data at a time.
Most languages provide some form of mutex, but in many of them, the lock is separate from the data. The compiler can’t force you to always lock before touching the data.
In Rust, the data lives inside the Mutex<T>:
use std::sync::Mutex;
fn main() {
let m = Mutex::new(5);
{
let mut num = m.lock().unwrap();
*num = 6;
}
println!("m = {:?}", m);
}
The only way to access the inner T is via lock, which returns a MutexGuard<T>:
MutexGuard<T>implementsDeref, so you can use it like a&Tor&mut T.- When the guard is dropped, it automatically unlocks the mutex.
The full signature of lock returns a Result<MutexGuard<T>>. As with channels, the Err case only happens if another thread using the mutex panicked, which “poisons” the mutex. This is Rust being conservative: if one thread panicked while holding the lock, the shared data might be in an inconsistent state.
While Rust’s Mutex avoids a lot of footguns, it can’t prevent everything:
- It can prevent data races, but not all race conditions.
- It can’t prevent deadlocks.
Those are inherent to the mutex abstraction itself.
Mutex and Arc
Most of the time you’ll see Mutex combined with Arc:
use std::sync::{Arc, Mutex};
use std::thread;
fn main() {
let counter = Arc::new(Mutex::new(0));
let mut handles = vec![];
for _ in 0..10 {
let counter = Arc::clone(&counter);
let handle = thread::spawn(move || {
let mut num = counter.lock().unwrap();
*num += 1;
});
handles.push(handle);
}
for handle in handles {
handle.join().unwrap();
}
println!("Result: {}", *counter.lock().unwrap());
}
Wrapping the Mutex in an Arc lets us share ownership of the same mutex across threads. Each thread locks, increments, and unlocks.
Atomics
Rust also has low‑level atomic types in std::sync::atomic, such as AtomicIsize and AtomicBool. These are all Sync, so you can share them across threads.
The naive pattern of “read → compute → write” is three separate operations. When multiple threads interleave them, you can get torn updates. Atomics compile down to single CPU instructions that perform the whole read‑modify‑write as one indivisible step.
Example using AtomicIsize:
use std::sync::Arc;
use std::sync::atomic::{AtomicIsize, Ordering};
use std::thread;
const COUNT: u32 = 1_000_000;
fn main() {
let global = Arc::new(AtomicIsize::new(0));
let clone1 = global.clone();
let thread1 = thread::spawn(move || {
for _ in 0..COUNT {
clone1.fetch_add(1, Ordering::SeqCst);
}
});
let clone2 = global.clone();
let thread2 = thread::spawn(move || {
for _ in 0..COUNT {
clone2.fetch_sub(1, Ordering::SeqCst);
}
});
thread1.join().unwrap();
thread2.join().unwrap();
println!("final value: {:?}", global);
}
One thread increments, the other decrements. No matter how many times you run it, the final value is 0. Try replacing AtomicIsize with a plain isize and you’ll see inconsistent results.
Global Variables
Rust makes it hard to use global mutable state.
constvalues are immutable.staticvariables are also immutable by default.
You can declare static mut, but any access must be inside an unsafe block; the compiler can’t enforce thread safety.
For simple types like integers and booleans, use atomic types rather than static mut.
Other Primitives
Rust also provides RwLock<T>, Condvar, Barrier, and more. They follow similar patterns; see the standard library docs for details.
Summary
In this post we looked at Rust’s tools for concurrency:
- Fork-join parallelism for highly parallelizable workloads.
- Channels for communication between decoupled components.
- Lower‑level primitives like
Mutex, atomics, etc. when you need finer control over shared mutable state.
We’ve also seen that Rust’s ownership system and type system help prevent many classic concurrency bugs. In Rust, memory safety and concurrency are closely related—ownership is a powerful tool to avoid data races and enforce disciplined sharing.
The goal of “fearless concurrency” is not to eliminate all complexity, but to give you tools and guarantees that make it much easier to write correct, robust concurrent code.